Total derivative
In the mathematical field of differential calculus, the term total derivative has a number of closely related meanings.
- The total derivative (full derivative) of a function
 , of several variables, e.g.,
, of several variables, e.g.,  ,
,  ,
,  , etc., with respect to one of its input variables, e.g., , is different from its partial derivative (
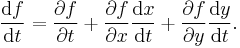
, etc., with respect to one of its input variables, e.g., , is different from its partial derivative ( ). Calculation of the total derivative of with respect to does not assume that the other arguments are constant while varies; instead, it allows the other arguments to depend on . The total derivative adds in these indirect dependencies to find the overall dependency of on . For example, the total derivative of
). Calculation of the total derivative of with respect to does not assume that the other arguments are constant while varies; instead, it allows the other arguments to depend on . The total derivative adds in these indirect dependencies to find the overall dependency of on . For example, the total derivative of  with respect to is
with respect to is
 :
:
 in the function . Because depends on , some of that change will be due to the partial derivative of with respect to . However, some of that change will also be due to the partial derivatives of with respect to the variables and . So, the differential is applied to the total derivatives of and to find differentials
in the function . Because depends on , some of that change will be due to the partial derivative of with respect to . However, some of that change will also be due to the partial derivatives of with respect to the variables and . So, the differential is applied to the total derivatives of and to find differentials  and
and  , which can then be used to find the contribution to .
, which can then be used to find the contribution to .

- It refers to a differential operator such as
- It refers to the (total) differential df of a function, either in the traditional language of infinitesimals or the modern language of differential forms.
- A differential of the form
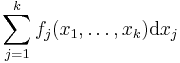
- It is another name for the derivative as a linear map, i.e., if f is a differentiable function from Rn to Rm, then the (total) derivative (or differential) of f at x∈Rn is the linear map from Rn to Rm whose matrix is the Jacobian matrix of f at x.
- It is a synonym for the gradient, which is essentially the derivative of a function from Rn to R.
- It is sometimes used as a synonym for the material derivative,
 , in fluid mechanics.
, in fluid mechanics.
Contents |
Differentiation with indirect dependencies
Suppose that f is a function of two variables, x and y. Normally these variables are assumed to be independent. However, in some situations they may be dependent on each other. For example y could be a function of x, constraining the domain of f to a curve in R2. In this case the partial derivative of f with respect to x does not give the true rate of change of f with respect to changing x because changing x necessarily changes y. The total derivative takes such dependencies into account.
For example, suppose
 .
.
The rate of change of f with respect to x is usually the partial derivative of f with respect to x; in this case,
 .
.
However, if y depends on x, the partial derivative does not give the true rate of change of f as x changes because it holds y fixed.
Suppose we are constrained to the line

then
 .
.
In that case, the total derivative of f with respect to x is
 .
.
Notice that this is not equal to the partial derivative:
 .
.
While one can often perform substitutions to eliminate indirect dependencies, the chain rule provides for a more efficient and general technique. Suppose M(t, p1, ..., pn) is a function of time t and n variables  which themselves depend on time. Then, the total time derivative of M is
which themselves depend on time. Then, the total time derivative of M is

The chain rule for differentiating a function of several variables implies that

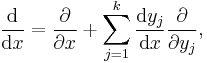
This expression is often used in physics for a gauge transformation of the Lagrangian, as two Lagrangians that differ only by the total time derivative of a function of time and the n generalized coordinates lead to the same equations of motion. The operator in brackets (in the final expression) is also called the total derivative operator (with respect to t).
For example, the total derivative of f(x(t), y(t)) is
Here there is no ∂f / ∂t term since f itself does not depend on the independent variable t directly.
The total derivative via differentials
Differentials provide a simple way to understand the total derivative. For instance, suppose  is a function of time t and n variables as in the previous section. Then, the differential of M is
is a function of time t and n variables as in the previous section. Then, the differential of M is
This expression is often interpreted heuristically as a relation between infinitesimals. However, if the variables t and pj are interpreted as functions, and is interpreted to mean the composite of M with these functions, then the above expression makes perfect sense as an equality of differential 1-forms, and is immediate from the chain rule for the exterior derivative. The advantage of this point of view is that it takes into account arbitrary dependencies between the variables. For example, if  then
then  . In particular, if the variables pj are all functions of t, as in the previous section, then
. In particular, if the variables pj are all functions of t, as in the previous section, then
The total derivative as a linear map
Let  be an open subset. Then a function
be an open subset. Then a function  is said to be (totally) differentiable at a point
is said to be (totally) differentiable at a point  , if there exists a linear map
, if there exists a linear map  (also denoted Dpf or Df(p)) such that
(also denoted Dpf or Df(p)) such that

The linear map  is called the (total) derivative or (total) differential of at
is called the (total) derivative or (total) differential of at  . A function is (totally) differentiable if its total derivative exists at every point in its domain.
. A function is (totally) differentiable if its total derivative exists at every point in its domain.
Note that f is differentiable if and only if each of its components  is differentiable. For this it is necessary, but not sufficient, that the partial derivatives of each function fj exist. However, if these partial derivatives exist and are continuous, then f is differentiable and its differential at any point is the linear map determined by the Jacobian matrix of partial derivatives at that point.
is differentiable. For this it is necessary, but not sufficient, that the partial derivatives of each function fj exist. However, if these partial derivatives exist and are continuous, then f is differentiable and its differential at any point is the linear map determined by the Jacobian matrix of partial derivatives at that point.
Total differential equation
A total differential equation is a differential equation expressed in terms of total derivatives. Since the exterior derivative is a natural operator, in a sense that can be given a technical meaning, such equations are intrinsic and geometric.
Application of the total differential to error estimation
In measurement, the total differential is used in estimating the error Δf of a function f based on the errors Δx, Δy, ... of the parameters x, y, .... Assuming that the interval is short enough for the change to be approximately linear:
- Δf(x) = f'(x) × Δx
and that all variables are independent, then for all variables,

This is because the derivative fx with respect to the particular parameter x gives the sensitivity of the function f to a change in x, in particular the error Δx. As they are assumed to be independent, the analysis describes the worst-case scenario. The absolute values of the component errors are used, because after simple computation, the derivative may have a negative sign. From this principle the error rules of summation, multiplication etc. are derived, e.g.:
- Let f(a, b) = a × b;
- Δf = faΔa + fbΔb; evaluating the derivatives
- Δf = bΔa + aΔb; dividing by f, which is a × b
- Δf/f = Δa/a + Δb/b
That is to say, in multiplication, the total relative error is the sum of the relative errors of the parameters.
References
- A. D. Polyanin and V. F. Zaitsev, Handbook of Exact Solutions for Ordinary Differential Equations (2nd edition), Chapman & Hall/CRC Press, Boca Raton, 2003. ISBN 1-58488-297-2
- From thesaurus.maths.org total derivative